A closer look at the demo project
Before you jump into making the game specific conditions and actions, we should go over what you will be creating. In a nutshell, you will tell an NPC character to navigate to a random waypoint and pick up all the items that are within 5 meters. This will continue until all items in the scene are picked up. The demo project that you downloaded came with a scene already setup and several scripts that the behavior tree will interact with.
The scene
Open the Demo scene, located under Assets/WUG/Scenes. There are three groups objects that are of interest in this scene:
- NPC is the character that will be driven by your behavior tree.
- Waypoints are five empty game objects spread across the scene.
- Items are 21 prefabs that have a box collider as a trigger and an
Itemscript. These are all grouped around a waypoint.
The scripts
There are four scripts already included in this project:
GameManagerprovides a top level view of the game by managing references to the NPC, Items and Waypoints. It has two helper methods that your behavior tree will use -GetClosestItem()andGetNextWayPoint().Itemuses theOnTriggerEnter()method to pickup the item viaGameManager.PickUpItem().GeneralExtensionscontains aShuffle()static helper method used byGameManagerto randomize the waypoint list duringStart.NonPlayerCharacterhas a reference to theNavMeshAgentand the enum for tracking theNavigationActivity, which is eitherWaypointorPickupItem.
The behavior tree
The behavior tree you will be writing may look complicated, but it is a simple one to traverse. Here is what you will be making:
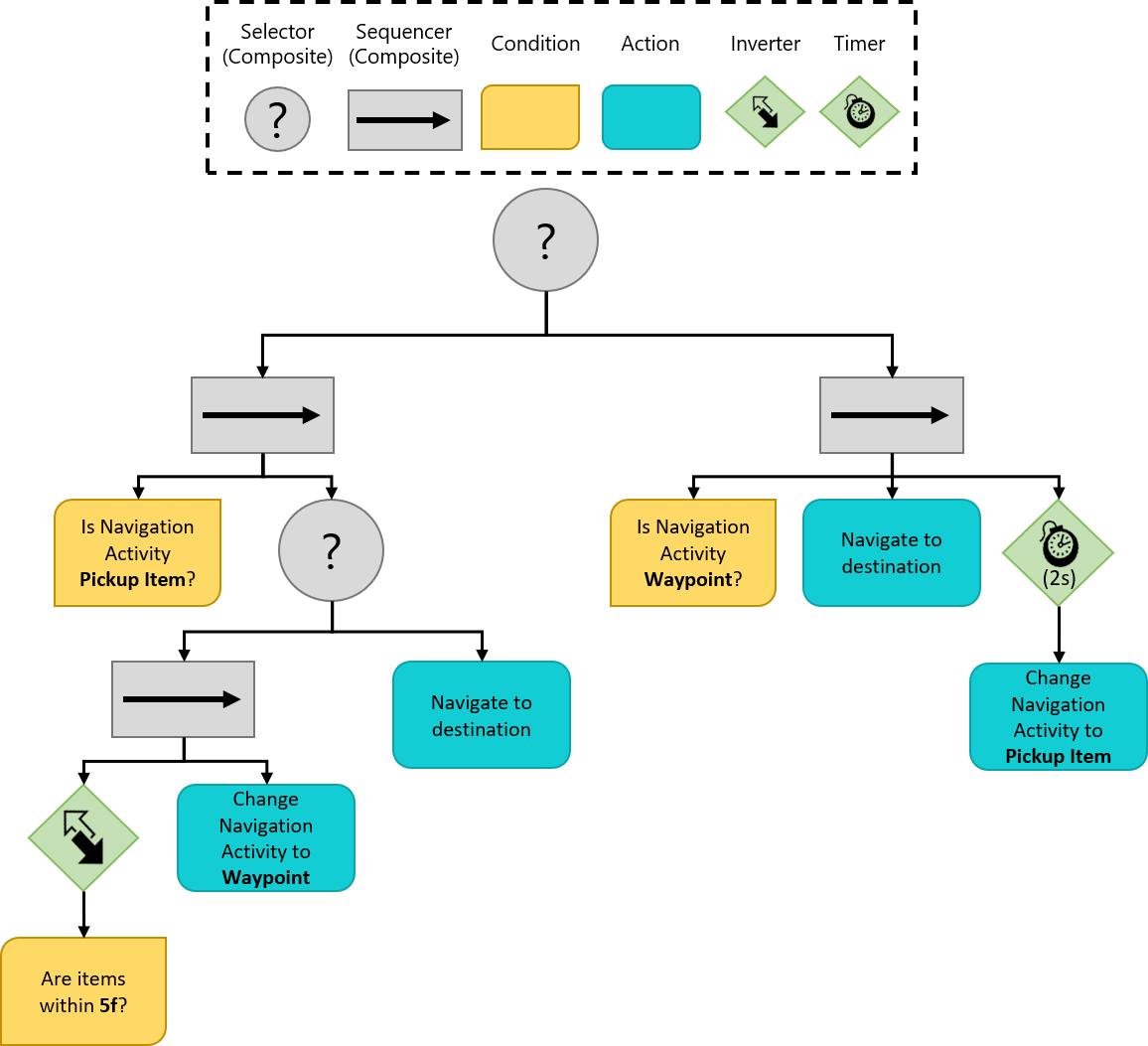
By having the first node as a Selector, we ensure that only one sequence (branch) will execute each run. Here is what each branch will do:
The left branch handles the logic for picking up all items within 5f of the waypoint. If there are no items, then the branch will set Navigation Activity to Waypoint. This will force the left branch to fail on the next condition check, which will ensure the right branch is evaluated. Here is an example of the evaluation for navigating the AI to the next item:
The right branch handles the logic for navigating to a waypoint. Once the AI arrives, it will use the timer decorator to pause for 2 seconds before changing the Navigation Activity from Waypoint to PickupItem. This switch will trigger the left branch to run the next time the tree is evaluated. Here is an example of the evaluation for moving the AI to the next waypoint: